








平行接近
根据 EN ISO 13855:2010 标准的计算向导
本向导给出的建议仅供参考,并不保证涵盖所有情况。为安全和正确地使用及安装产品,必须遵循当前有效版本的相关标准和法规。Leuze electronic GmbH + Co. KG 对因使用本向导而产生的任何损害或通用标准和指令的准确性不承担责任。
使用安全激光扫描仪进行平行接近区域的最小安全距离计算
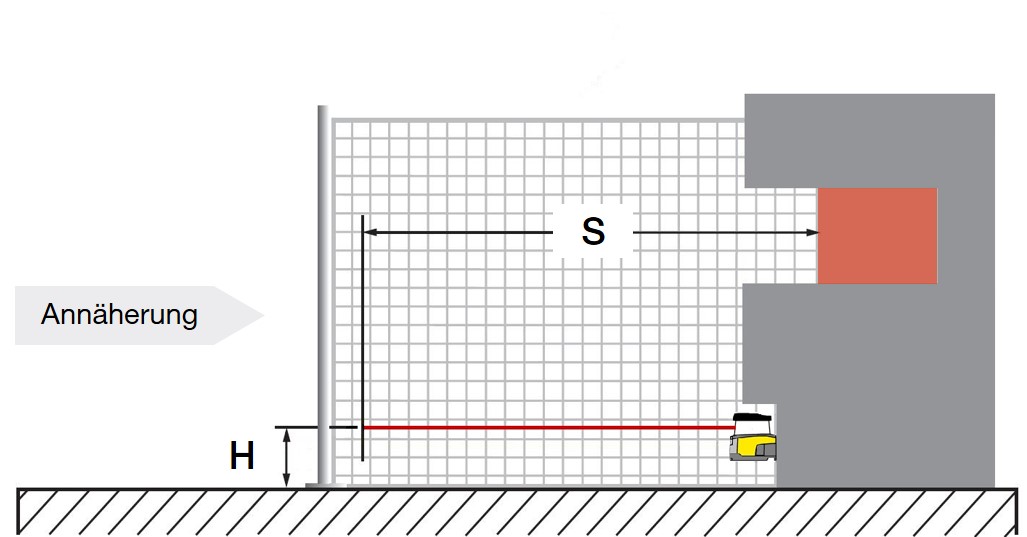 |
最小距离 SRT 的计算公式如下: S – 危险区与检测点之间的最小距离 C: = 1200 mm - 0,4 * H Z – 安全激光扫描仪的其他附加距离 |
在使用安全激光扫描仪时,IEC 61496-3 标准规定必须考虑附加距离:
- ZSM 用于修正测量误差。该数值取决于具体的设备,相关说明请参见对应的操作手册。对于 Leuze RSL 400 安全激光扫描仪,当防护区域半径 ≤ 6.25 m 时,ZSM 为 100 mm;当防护区域半径 > 6.25 m 时,ZSM 为 120 mm。
- ZREFL:避免在在防护区域边界之外的光束平面内使用反光板。如果无法避免,则必须增加 100 mm 的附加距离 ZREFL。
关于在自动导引车上使用的注记:
根据 EN ISO 3691-4 “工业车辆 – 安全要求和验证” 标准,防护装置的测试还必须考虑最不利的条件(例如负载、运输路径的倾斜度),并结合车辆规定的各项参数。这些要求可能会导致防护区域尺寸增大。
使用安全激光扫描仪进行平行接近区域的最小安全距离计算
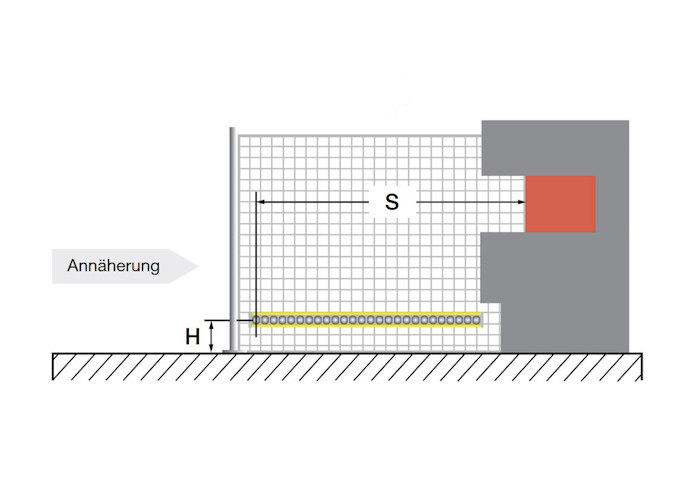 |
最小距离 SRT 的计算公式如下: S – 危险区与检测点之间的最小距离 C – 用于考虑在触发防护装置之前侵入危险区域的安全系数。 C= 1200 mm - 0.4 * H,CMin = 850 mm H:防护区域距离参考平面的高度 安装高度为 H 时所需的分辨率 d: d [mm] ≤ (H/15) + 50 mm 注意:高度 > 300 mm 即认为存在人员从下方钻入的可能性。 |